 官方网站-首页
官方网站-首页
国家高新技术企业

 官方网站-首页
官方网站-首页

 发布时间
2025-11-27 19:30:40
发布时间
2025-11-27 19:30:40
 作者
作者
 阅读 218次
阅读 218次
【导(dǎo)语(yǔ)】工(gōng)厂(chǎng)上(shàng)下(xià)料(liào)场(chǎng)景(jǐng)正(zhèng)经(jīng)历(lì)智(zhì)能(néng)化(huà)变(biàn)革(gé),复(fù)合(hé)机器人以“移动+操作”一体化能力突破传统局限,直击效率、精度与柔性痛点,通过四大核心优势——全流程闭环作业、动态高精度定位、15分钟快速换产及空间成本优化,成为生产全流程升级的效率引擎与柔性变革者,为工厂提供降本增效的“最优解”。
工厂上下料场景是复合机器人发挥优势的核心领域,它完美解决了传统人工和单一设备在效率、精度与柔性上的痛点,促进生产全流程的智能化升级。
在工厂上下料场景中,复合机器人凭借“移动+操作”一体化能力,突破了传统AGV“仅能搬运”、机械臂“固定作业”的局限,成为连接“原料-设备(bèi)-成(chéng)品(pǐn)”全链(liàn)条(tiáo)的(de)智(zhì)能(néng)执(zhí)行(xíng)者(zhě)。其(qí)优(yōu)势(shì)可(kě)概(gài)括(kuò)为(wèi)“效(xiào)率(lǜ)倍(bèi)增(zēng)、精(jīng)度(dù)跃(yuè)升(shēng)、柔(róu)性(xìng)突(tū)破(pò)、成(chéng)本(běn)优(yōu)化(huà)”四(sì)大(dà)维(wéi)度(dù),直(zhí)击(jī)生(shēng)产(chǎn)现(xiàn)场(chǎng)的(de)核(hé)心(xīn)痛(tòng)点(diǎn)。

1. 一体化作业流程:从“分段搬运”到“全程无人”
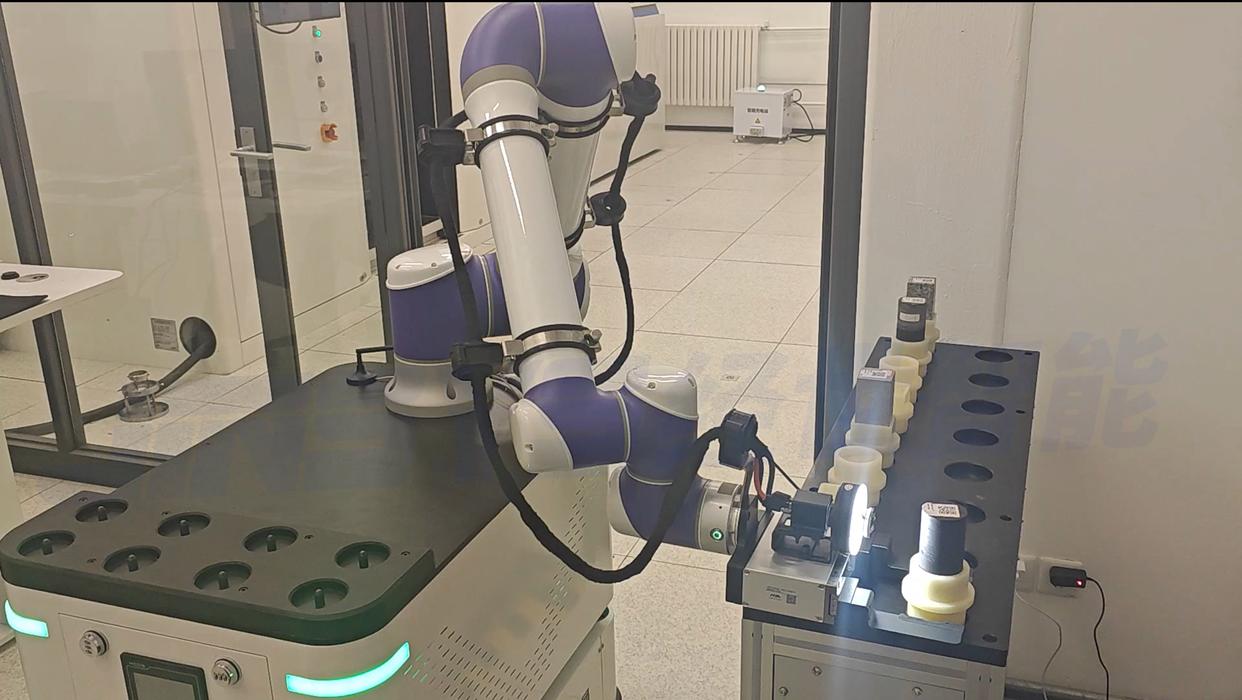
传统上下料需人工或AGV将物料转运至固定机械臂工位,存在“中转等待、定位误差叠加”等问题。经世智能复合机器人通过AGV底盘+机械臂+视觉系统的深度协同,可直接完成“原料仓取料→机台精准上下料→成品转运至下一工序”的全流程闭环,省去中间环节。
效率提升:节拍时间缩短30%-50%,如CNC加工场景中,单台机器人可替代3-4名人工,设备稼动率从60%提升至85%以上
典型场景:汽车零部件产线中,机器人自主完成毛坯从料架抓取→车床上下料→加工后转运至检测区,全程无需人工干预

2. 动态高精度定位:地面不平也能“一抓准”
针对工厂地面不平整、设备振动等复杂环(huán)境,经世智能复合机器人搭载一体化控制系统+车身姿态动态补偿算法,实现移动过程中的实时姿态校准。即使在行驶状态下,机械臂末端重复定位精度仍可达±0.5mm,解决传统AGV“移动即失准”、机械臂“固定才精准”的矛盾。
3. 柔性化快速换产:多品种混线生产的“万能手”
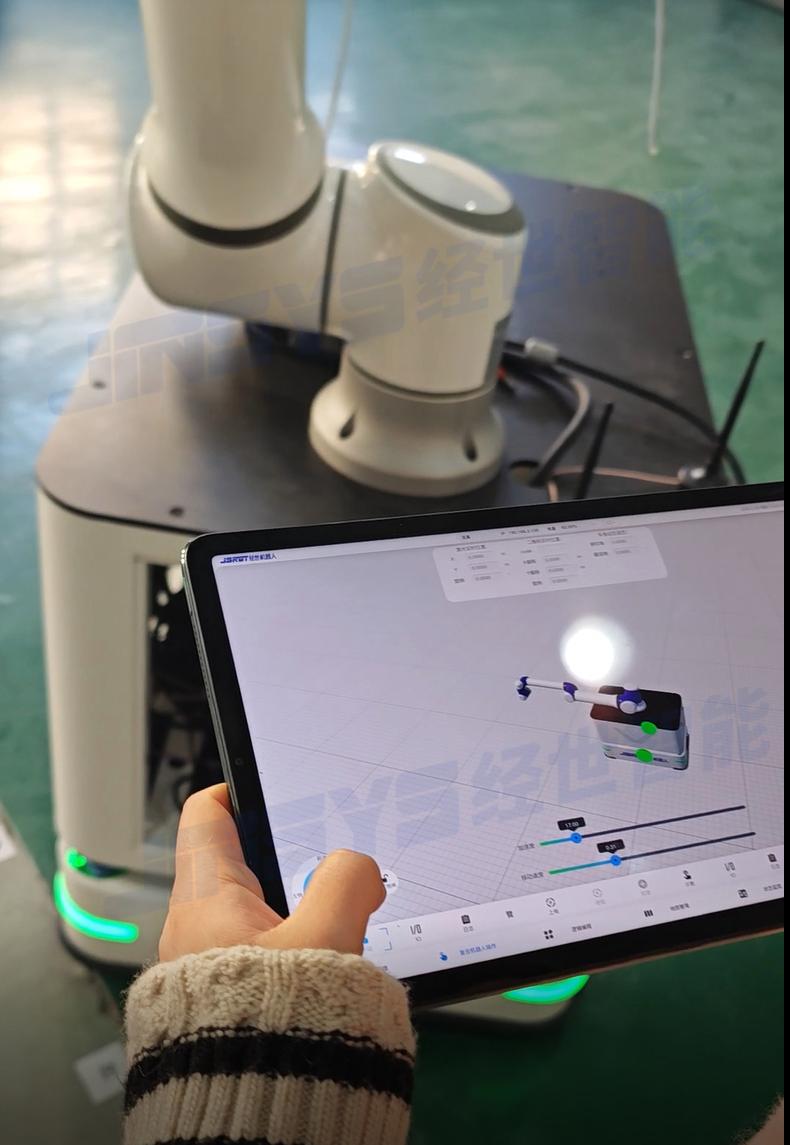
面对小批量、多品种的生产需求,经世智能复合机器人通过模块化夹具+零代码编程系统(MCR-Master复合机器人一体化操作系统),实现15分钟内快速换产。无需改造产线,即可适配不同尺寸、形状的工件,大幅降低换型成本。
操作便捷性:MCR-Master复合机器人一体化操作系统,工人通过触摸屏“拖拽式”示教,无需专业编程知识即可完成新任务配置。
4. 空间与成本优化:小投入实现大升级
相比“AGV+固定机械臂”的分体方案,复合机器人省去地面磁导航改造、中间缓存工位等额外成本,部署周期大幅压缩。同时,自主避障与路径优化功能减少对通道空间的占用,工厂利用率提升20%-30%。

复合机器人在工厂上下料场景中的优势,不仅是设备的简单叠加,更是通过算法、硬件、软件的深度融合,实现了“移动中精准操作”这一核心突破。对于追求效率提升、柔性生产、降本增效的工厂而言,复合机器人已成为上下料环节智能化升级的(de)“刚(gāng)需(xū)选(xuǎn)择(zé)”。














